Sichere mobile Robotik – unüberwindbare Hürde oder Helfer der Zukunft?
Mobile Roboter finden in unterschiedlichen Varianten, Ausbaustufen und für verschiedenste Zwecke bereits Anwendung in vielen Branchen. Im öffentlichen Bereich werden sie unter anderem in der Gastronomie (z.B. für das Servieren von Speisen & Getränken) oder im heimischen Garten (z.B. Rasenmäher-Roboter) genutzt. Im industriellen Kontext unterstützt mobile Robotik häufig bei intralogistischen Prozessen und beim Gütertransport, da sie unwiderlegbare Vorteile bieten kann: flexible Reaktion auf sich ändernde Prozess- oder Produktionslayouts, hohe Skalierbarkeit und eine Vielzahl an Erweiterungsmöglichkeiten.
Die Einführung von mobiler Robotik stellt jedoch vor allem kleine und mittlere Unternehmen (KMU) vor Herausforderungen. Sehr spezifische Anforderungen von Unternehmen an ein derartiges System bedingen oftmals die (teilweise) Eigenentwicklung einer mobilen Plattform bzw. deren Aufbau oder das Hinzuziehen eines erfahrenen Integrators, wodurch Mehrkosten entstehen. Die Einstiegshürden zur (rechts)sicheren Implementierung wirken auf den ersten Blick hoch und das große Feld regulatorischer Rahmenbedingungen unüberblickbar.
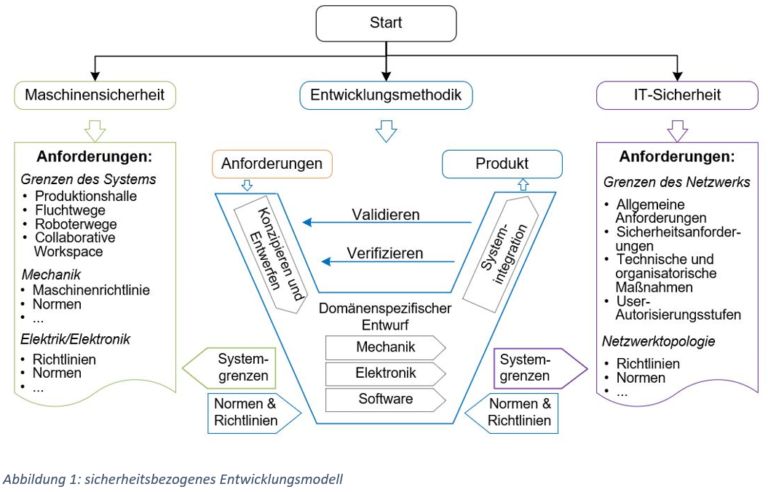
Im Zuge dessen wurde eine Methodik auf Basis des V-Modells entwickelt, woran sich Hersteller, Integratoren und Betreiber orientieren können, um die zentralen Aspekte von Entwicklung, Integration und Nutzung von mobilen Robotersystemen systematisch zu betrachten. Beginnend beim Systementwurf muss geklärt werden, wofür der Roboter denn genau eingesetzt werden soll. Welche (Teil)Aufgaben werden übernommen? Welcher Aufbau ist notwendig? Wie wird die Lasthandhabung durchgeführt? Wie navigiert der Roboter in seiner Umgebung? Ist der Roboter besonderen Umwelteinflüssen ausgesetzt?
Diese und viele andere Fragen entscheiden, wie das mobile System letztendlich aussehen und funktionieren wird.
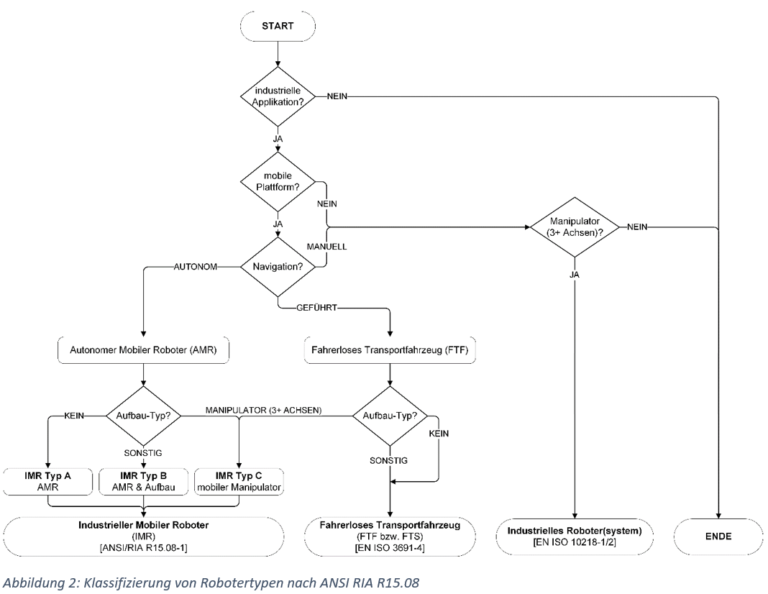
Hierbei wird auch die Frage geklärt: Ist es überhaupt ein „mobiler Roboter“? Die europäische Normung (ISO 3691-4) unterscheidet nämlich autonome mobile Roboter (AMR) und fahrerlose Transportsysteme (FTS bzw. AGV) nicht. Normen aus dem US-amerikanischen Bereich (ANSI RIA R15.08) tun dies jedoch und definieren die autonome Bahnplanung und eigenständige Hindernisumfahrung als explizite Eigenschaften von AMR. Wird ein mobiles System also spurgeführt (z.B. optisch, induktiv oder magnetisch), kann man von einem FTS sprechen. Auch die Art des anwendungsspezifischen Aufbaus (Linearsystem, Roboterarm etc.) teilt die mobilen Systeme innerhalb der R15.08 in drei verschiedene Typen.
All jene Aspekte nehmen Einfluss auf die Sicherheit und die notwendigen Risikominderungsmaßnahmen. Je nach Umgebung und Interaktion mit dem Menschen, müssen unterschiedliche Sicherheitskonzepte entwickelt und Schutzeinrichtungen implementiert werden. Auf dem Markt erhältliche mobile Transportplattformen (z.B. Mobile Industrial Robots) sind häufig mit diagonal angeordneten AOPDDR (Laserscanner) ausgestattet. Ob diese Schutzeinrichtungen ausreichen oder nicht, muss im Einzelfall und im Kontext der sonstigen Aufbauten beurteilt werden – Stichwort: wesentliche Veränderung von Maschinen.
Neben der physischen Sicherheit (Safety) spielt natürlich die Informationssicherheit (Security) ebenso eine zentrale Rolle. Für beide Domänen gilt, dass durch eine frühzeitige Betrachtung in frühen Entwicklungsphasen viel Geld und sonstige Ressourcen gespart werden können. Neben der Normenreihe IEC 62443, die unter anderem das Zones and Conduits Modell vorstellt, kann die technische Regel ISO/TR 22100-4 ebenfalls nützliche Hilfestellung bei IT-Security-bedingten Auswirkungen auf die physische Sicherheit bieten. Für getroffene Security-Maßnahmen empfiehlt es sich letztendlich Penetration Tests durchzuführen, um die Stichhaltigkeit und Widerstandsfähigkeit bewerten zu können.
Fazit: Für die „Fabrik von Morgen“ spielen autonome mobile Roboter und fahrerlose Transportsysteme zweifelsohne eine zentrale Rolle. Unternehmen, die zukunftsorientiert produzieren und sich mit der Thematik der mobilen Robotik auseinandersetzen möchten, können durch eine frühzeitige Betrachtung Wettbewerbsvorteile erzielen. Entscheidend für die erfolgreiche Umsetzung sind klare Vorstellungen, realistische Erwartungen und natürlich die Gewährleistung von Safety und Security zu jeder Zeit.

Clemens Ambros, MSc, CMSE® CECE
Lecturer & Researcher | Kompetenzfeld Digital Manufacturing,Automation & Robotics |
FH Technikum Wien